NASA Autonomous Search and Mapping Rover Challenge
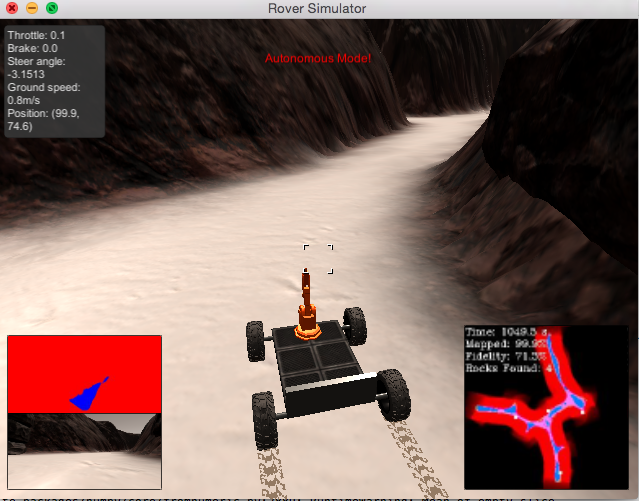
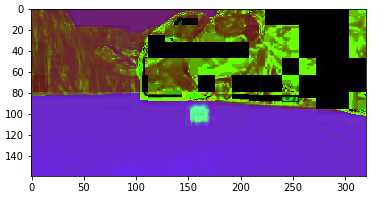


Developed the perception and decision steps for an autonomous differential drive rover navigating an unknown environment in Unity simulation. NASA challenge was to generate a map of navigateable terrain and identify samples of interest (gold rocks) from 30fps camera input. Performed a perspective transform to shift the camera image to an overhead view and HSV thresholding to differentiate sand colored terrain from walls and samples. Decision step used proportional feedback control to set steering angle towards on offset dependent on the median x parameter of navigateable pixels resulting in a "wall-crawling" effect that worked to ensure >99% terrain mapping.
Experience with OpenCV, Feedback Control, Python, Object Recognition, Mapping, OOP.
Full code and description available here